EGO team develops robot array to fight newtonian noise
Robots, monitoring of seismic activity and gravitational wave detectors: three topics of cutting-edge science that come together through the Flexible Grid Mapping Tool (FGMT), developed at the European Gravitational Observatory (EGO) within the context of the AHEAD 2020 EU funded project.
Gravitational wave detectors, such as Virgo, LIGO and KAGRA are affected by a variety of noise sources, both from the natural environment and from human activities, including the detector's operations themselves. One of these noises is called “Newtonian Noise”, and it’s generated by natural mass-density fluctuations of the ground and seismic displacements, which change over time. Removing this noise from the data stream requires a real-time updated map of it, which means not only measuring it over time, but constantly repositioning the sensors to the optimal positions to achieve best measurement quality. Virgo is a "L" shape experiment with two equal arms long 3 km each, at the vertices are three large experimental halls hosting the mirrors, which are the most delicate component of the experiment. Therefore the Newtonian Noise must be mapped around the mirrors, and that’s where the sensors need to be moving.
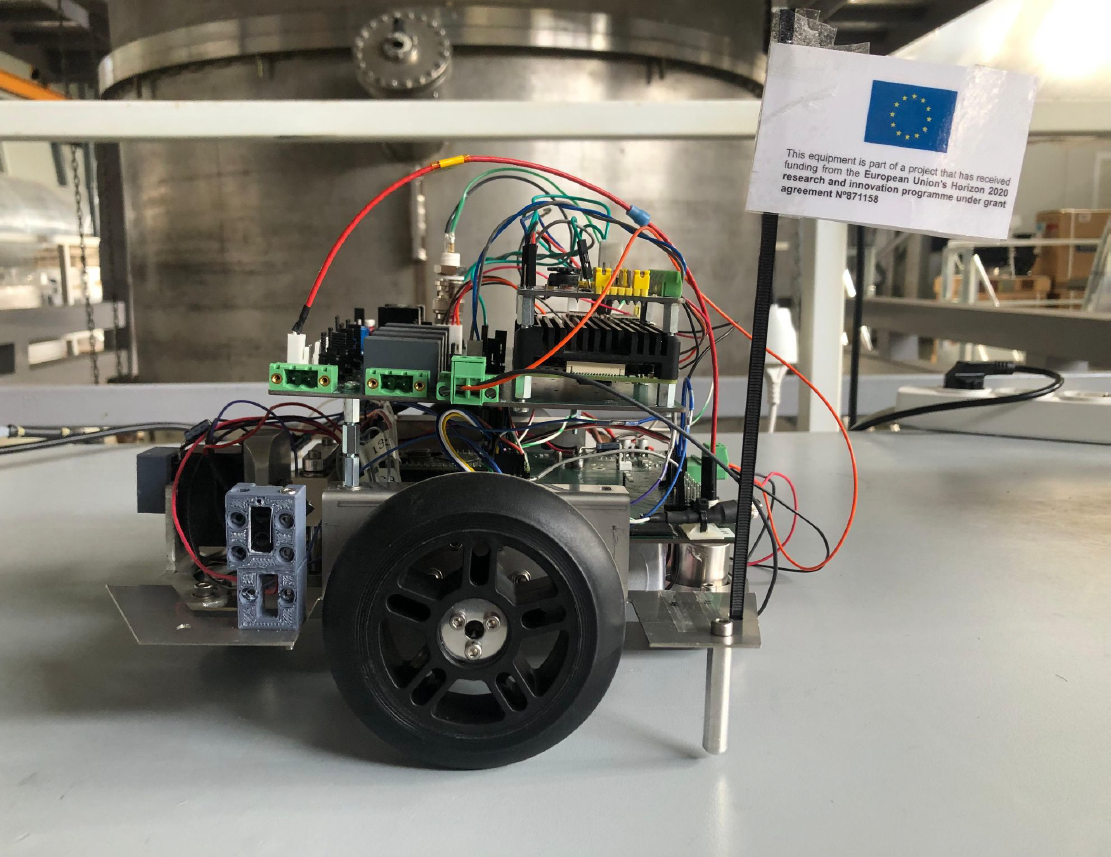
The FGMT tool developed by EGO tackles this problem using an array of small autonomous robots with seismic sensors installed on them. The robotic sensors are able to move autonomously throughout the experimental area to reach the optimal positions, take measurements and then communicate results to a control unit, which provides them with the coordinates of the next position they need to reach.
The measurements could also be more than just seismic ones, allowing Virgo researchers to map various noises affecting the detector, not just Newtonian Noise. For now a test array of three robots has been developed, covering a 50m² space within a technical building of the Virgo interferometer.
The tool was developed in collaboration with Gran Sasso Science Institute (GSSI) as part of the AHEAD 2020 EU funded project, and it is just a prototype. However, the approach is promising and could be implemented on a larger scale, both in terms of number of robots and area covered.
You may be interested

EGO and Virgo are taking part in the European Researchers Night with Bright Night and PICO

Two instrumented baffles installed in Virgo by IFAE Barcelona

The new LIGO–Virgo–KAGRA Catalog sets new records in precision gravitational astronomy

Gravitational wave detectors can now ‘auto-tune’ their signals

Cosmic Explorer: a seminar by David Shoemakerat EGO
Contacts
Via E. Amaldi,5
56021 Cascina (PI) - Italy
Tel +39 050 752511
Contact us
How to reach us
Resources
Stay Tuned
EGO is a consortium of
![]()
![]()
![]()